|
Tenok
A Linux-like Real-Time Operating System for Robotics and Internet of Things
|
|
Tenok
A Linux-like Real-Time Operating System for Robotics and Internet of Things
|
#include <pthread.h>#include <signal.h>#include <stdbool.h>#include <stdint.h>#include <sys/limits.h>#include <sys/resource.h>#include <task.h>#include <common/list.h>#include <common/util.h>#include <fs/fs.h>#include <kernel/kfifo.h>#include <kernel/time.h>#include <kernel/wait.h>#include "kconfig.h"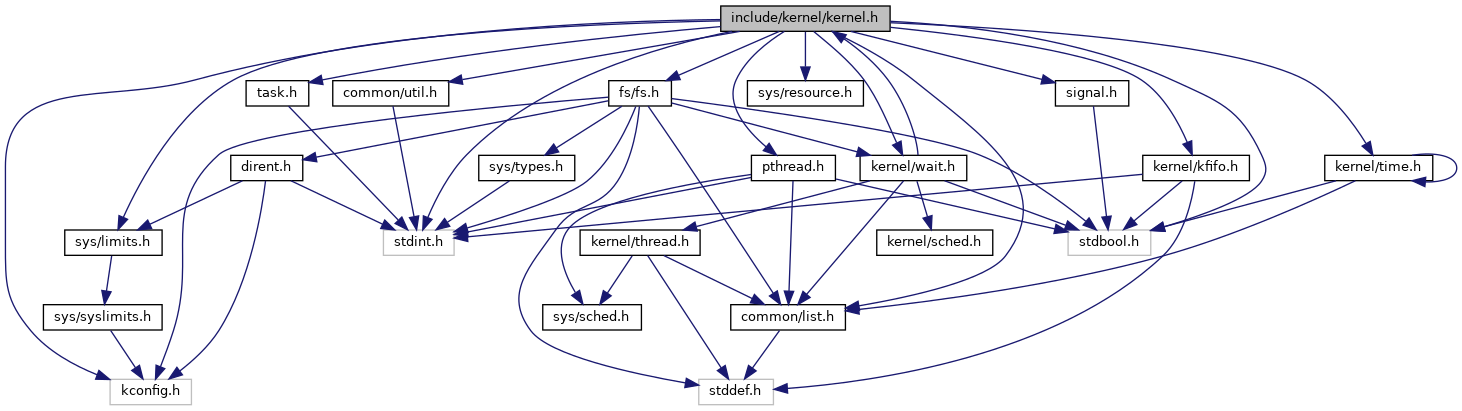
Go to the source code of this file.
Data Structures | |
| struct | syscall_info |
| struct | staged_handler_info |
| struct | task_struct |
| struct | thread_info |
Macros | |
| #define | DEF_SYSCALL(func, _num) |
| #define | SYSCALL_ARG(thread, type, idx) *((type *) thread->syscall_args[idx]) |
Enumerations | |
| enum | { THREAD_WAIT , THREAD_READY , THREAD_RUNNING , THREAD_SUSPENDED , THREAD_TERMINATED } |
| enum | { KERNEL_THREAD = 0 , USER_THREAD = 1 } |
Variables | |
| enum { ... } | THREAD_STATUS |
| enum { ... } | THREAD_TYPE |
| #define DEF_SYSCALL | ( | func, | |
| _num | |||
| ) |